|
|||||
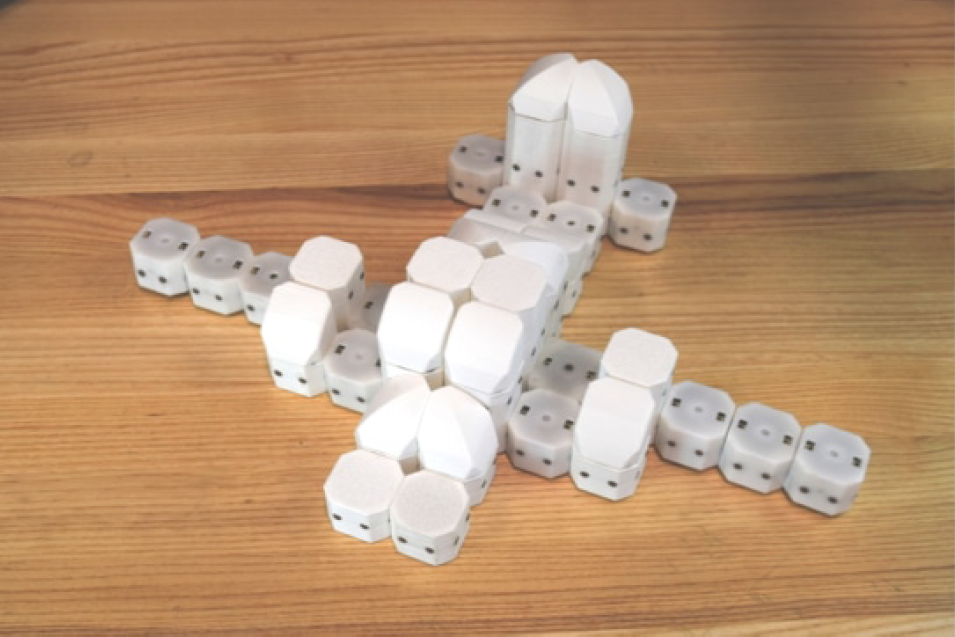
| Passive haptic proxy objects allow for rich tangible interaction, and this is especially true in VR applications. However, this requires users to have many physical objects at hand. Our paper proposes robotic assembly at run-time of low-resolution haptic proxies for tangible interaction and virtual reality. These assembled physical proxy objects are composed of magnetically attached blocks which are assembled by a small multi robot system, specifically Zooids. We explore the design of the basic building blocks and illustrate two approaches to assembling physical proxies: using multirobot systems to (1) self-assemble into structures and (2) assemble 2.5D structure with passive blocks of various heights. The success rate and completion time are evaluated for both approaches. Finally, we demonstrate the potential of assembled proxy objects fortangible interaction and virtual reality through a set of demonstration.
|
|||||
| ·VIDEO | · PROJECT PAGE |